Oprogramowanie Dyno2 zostało stworzone, aby sprostać szerokiej rzeszy użytkowników. Nadaje się zarówno do przeprowadzania wielogodzinnych testów niezawodności silnika, jak i do krótkiego pomiaru mającego na celu łatwe wyznaczenie charakterystyki silnika. Kluczowym aspektem jest uniwersalność. Tworzymy Dyno2 tak aby mogło obsłużyć wszystkie typy hamowni z różnorodnym osprzętem. Wszystkie systemy zaprojektowane są transparentnie i pozwalają użytkownikowi na wprowadzenie własnych ustawień.
Oprogramowanie dostarczane jest darmowo wraz ze sterownikiem DC1.
Kluczowe zalety Dyno2 to:
- Wsparcie dla wielu rodzajów hamowni – silnikowe, podwoziowe, inercyjne, obciążeniowe
- Programowalne sekwencje testowe dla utrzymywania obrotów silnika i sterowania przepustnicą we współpracy ze sterownikiem silnika Ecumaster EMU Black
- Wsparcie hamowni z jedną lub dwiema osiami z mechaniczną synchronizacją osi
- Wsparcie do 4 hamulców elektrowirowych – 2 hamulce na oś
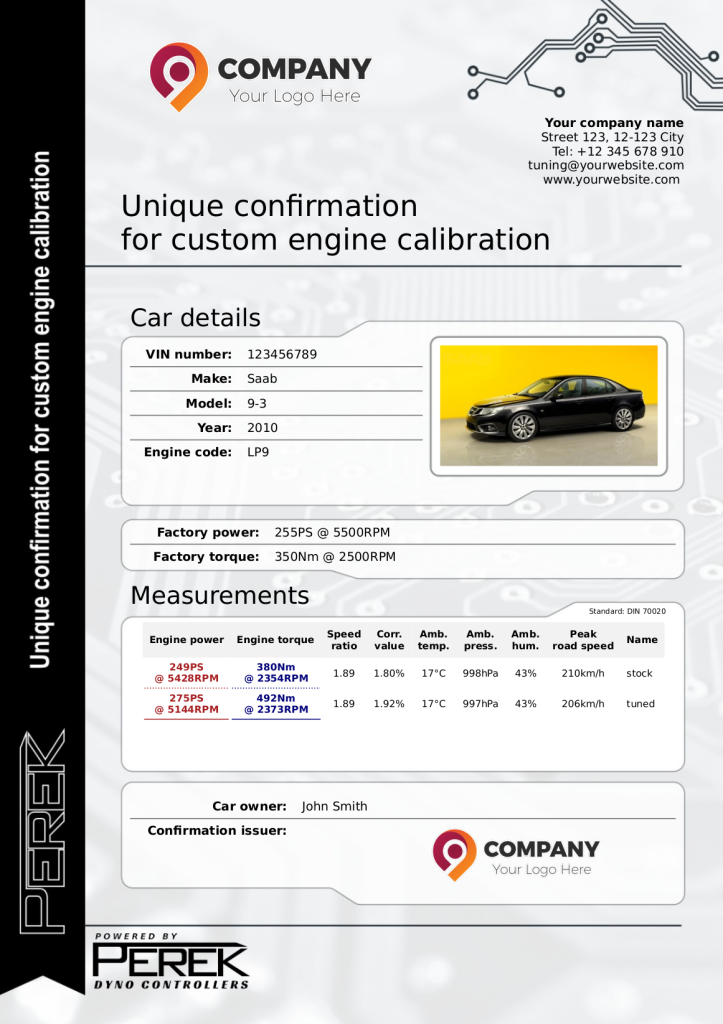
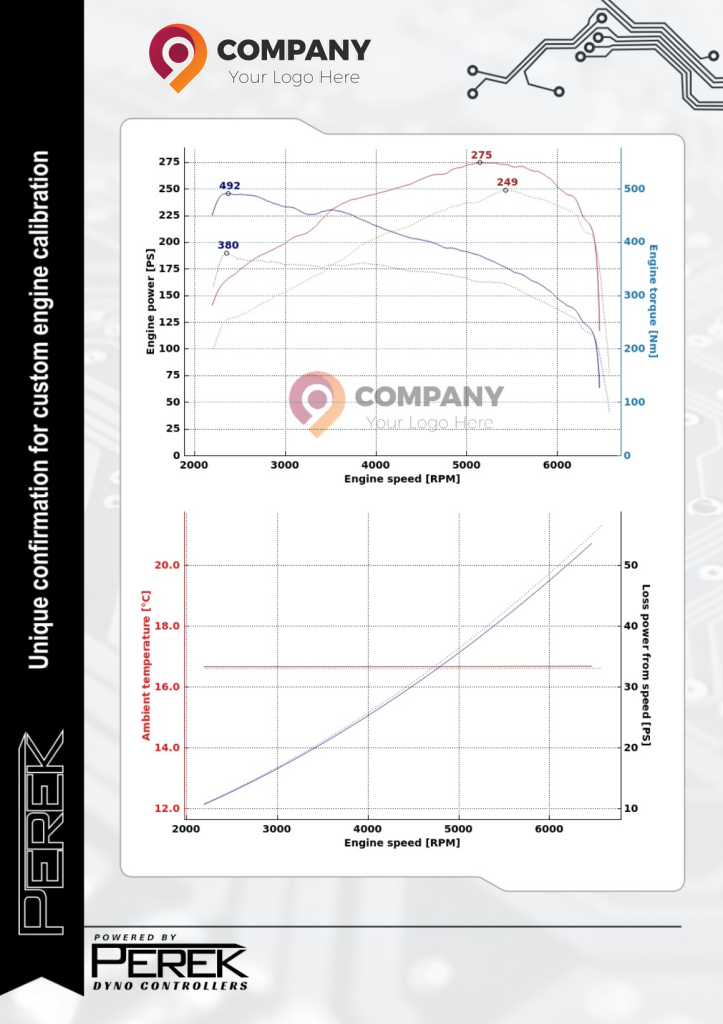
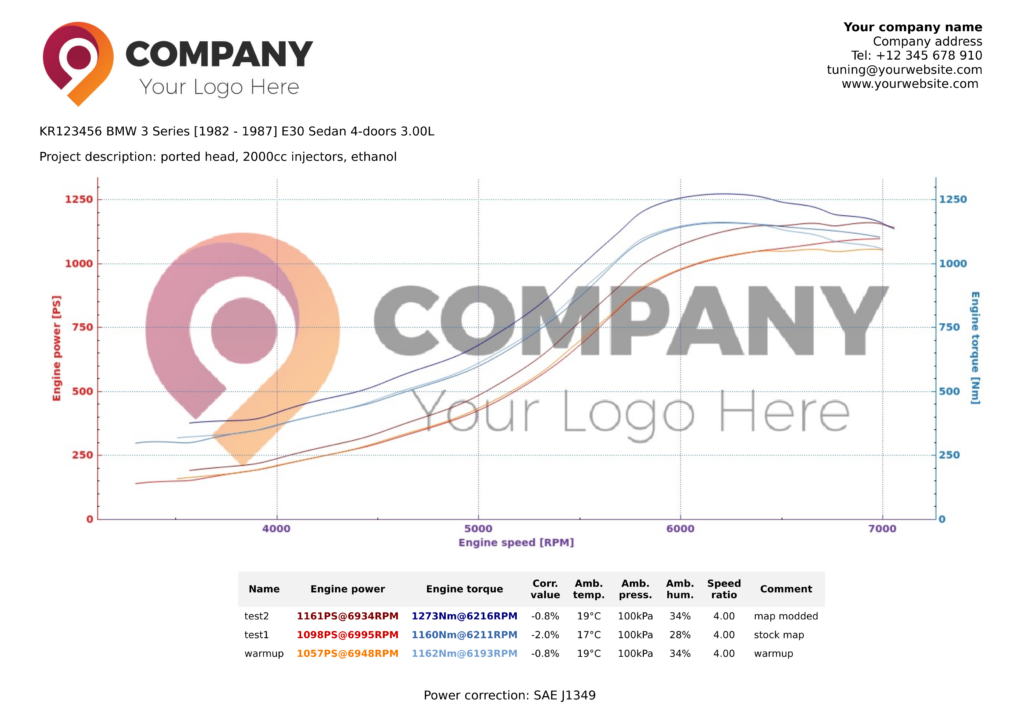
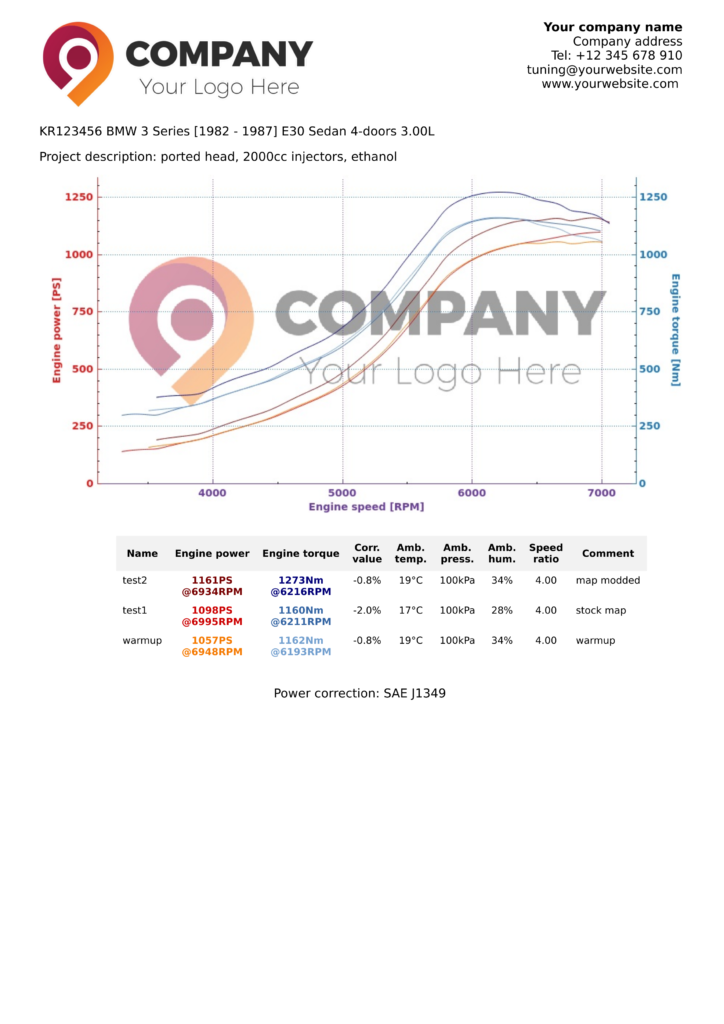
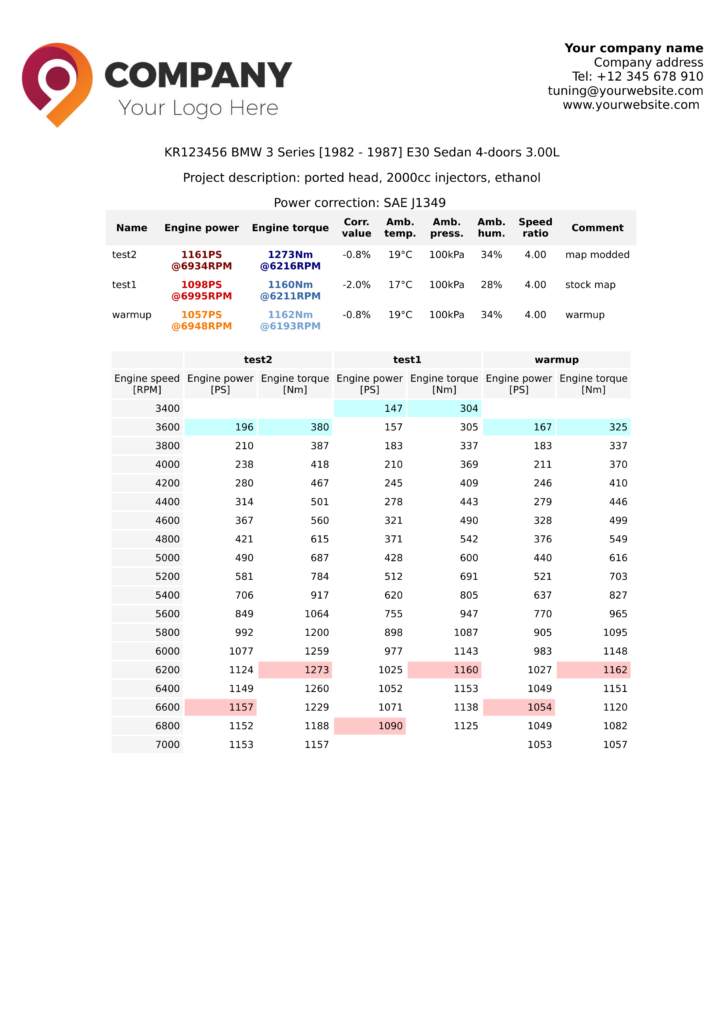
- Wbudowany czujnik warunków otoczenia (temperatura, ciśnienie, wilgotność) dla wprowadzania korekcji mocy
- Wsparcie dla interfejsu OBD przez Bluetooth lub USB
- W pełni konfigurowalne oprogramowanie ułatwiające współpracę z dowolną hamownią
- Narzędzia ułatwiające kalibracje tensometrów, bezwładności rolek oraz kontroli hamulca
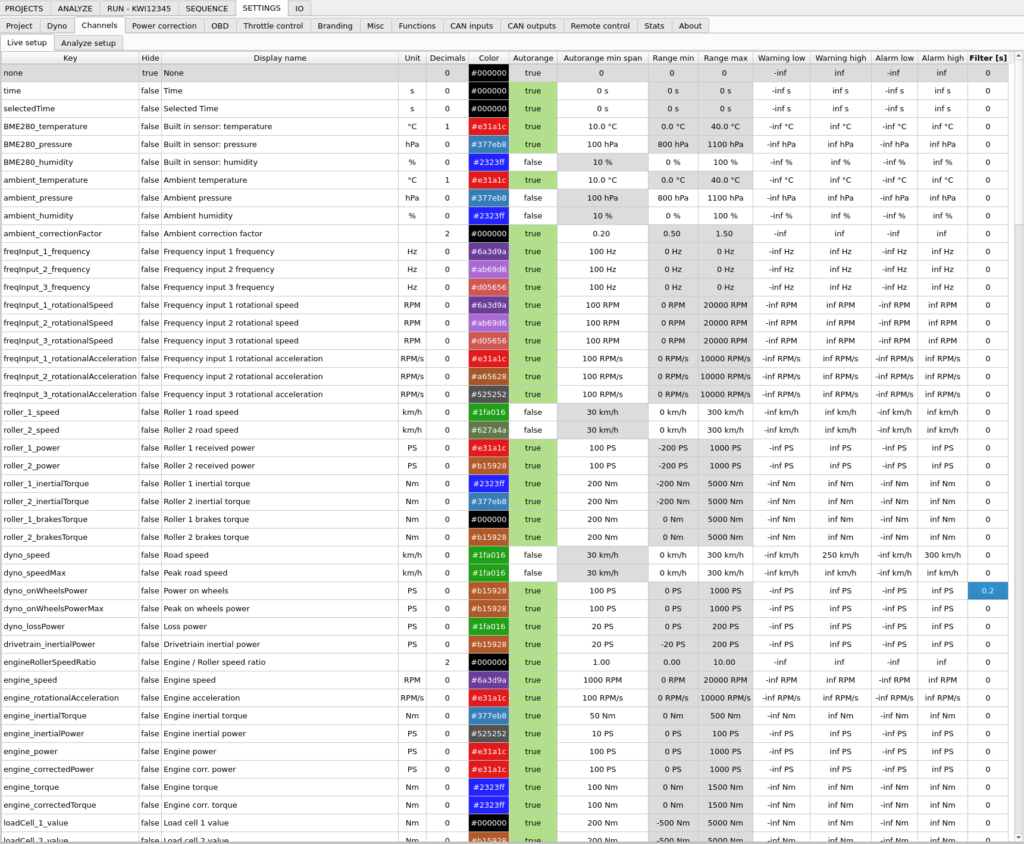
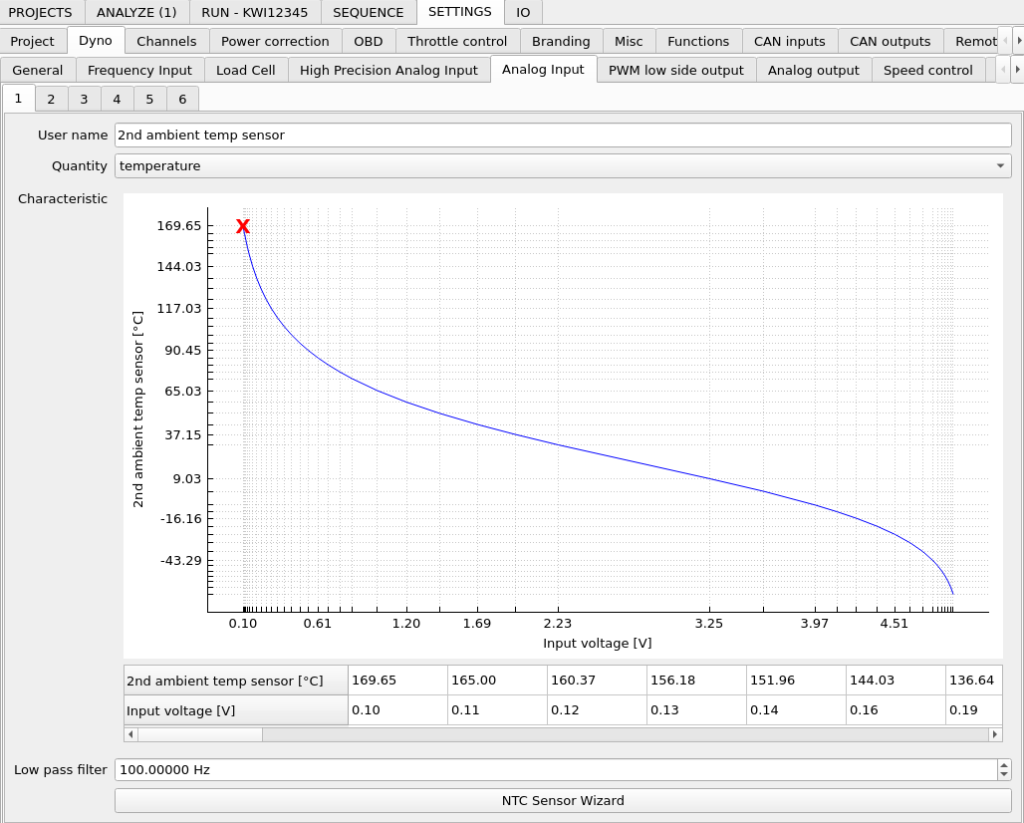
- Elastyczne charakterystyki do konwersji sygnałów analogowych na wartości fizyczne
- Dowolny wybór jednostek fizycznych – metrycznych oraz calowych
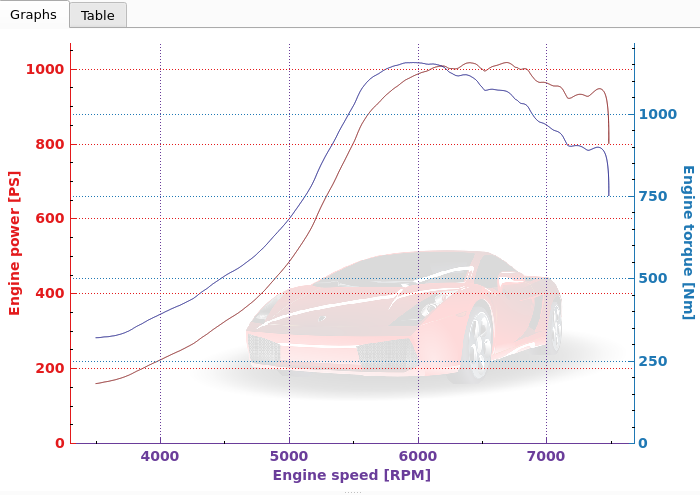
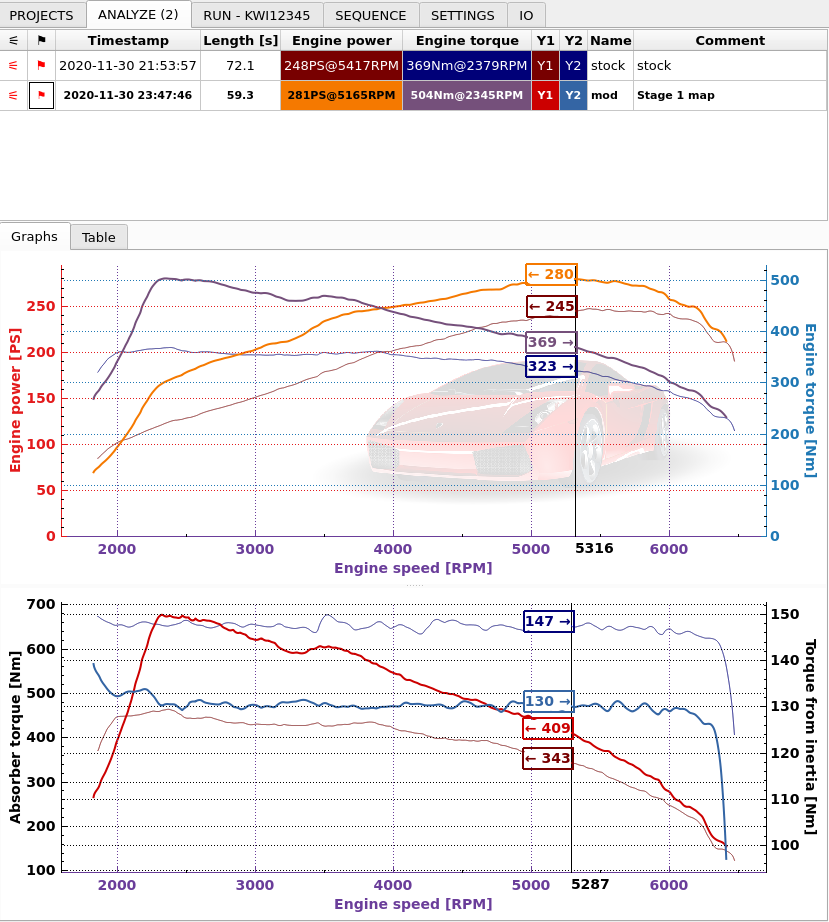
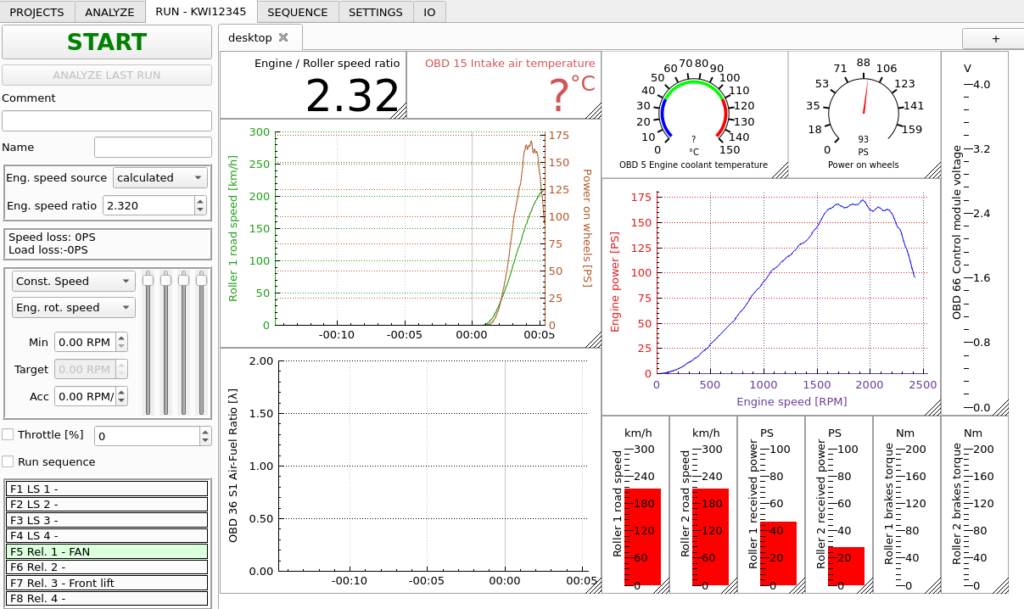
- Podgląd parametrów pracy hamowni oraz rysowanie wykresów w czasie rzeczywistym
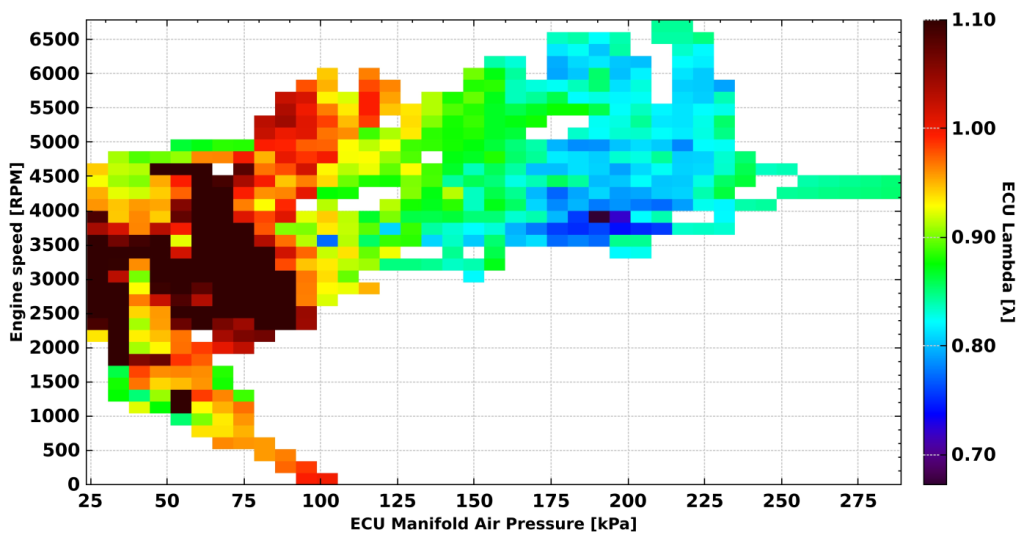
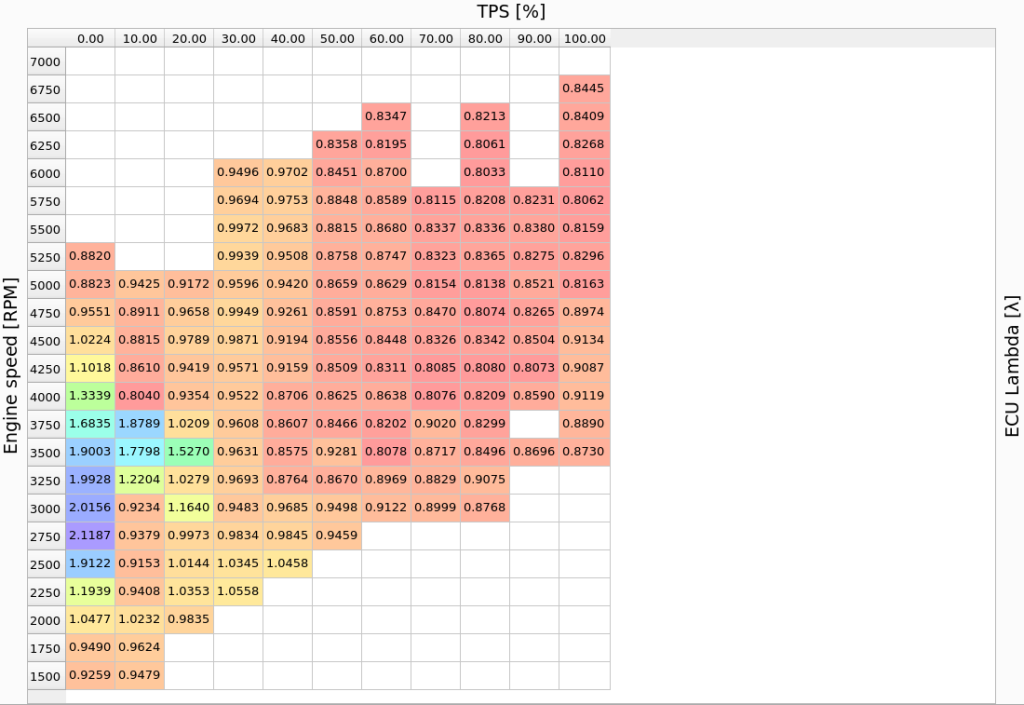
- Wykresy zależności pomiędzy parametrami – np. moc silnika w funkcji kąta zapłonu
- Elastyczne tryby kontroli hamulca: stała moc, blokada obrotów, limit przyrostu obrotów, sekwencje testowe
- Możliwość regulacji wygładzania wykresów przez użytkownika
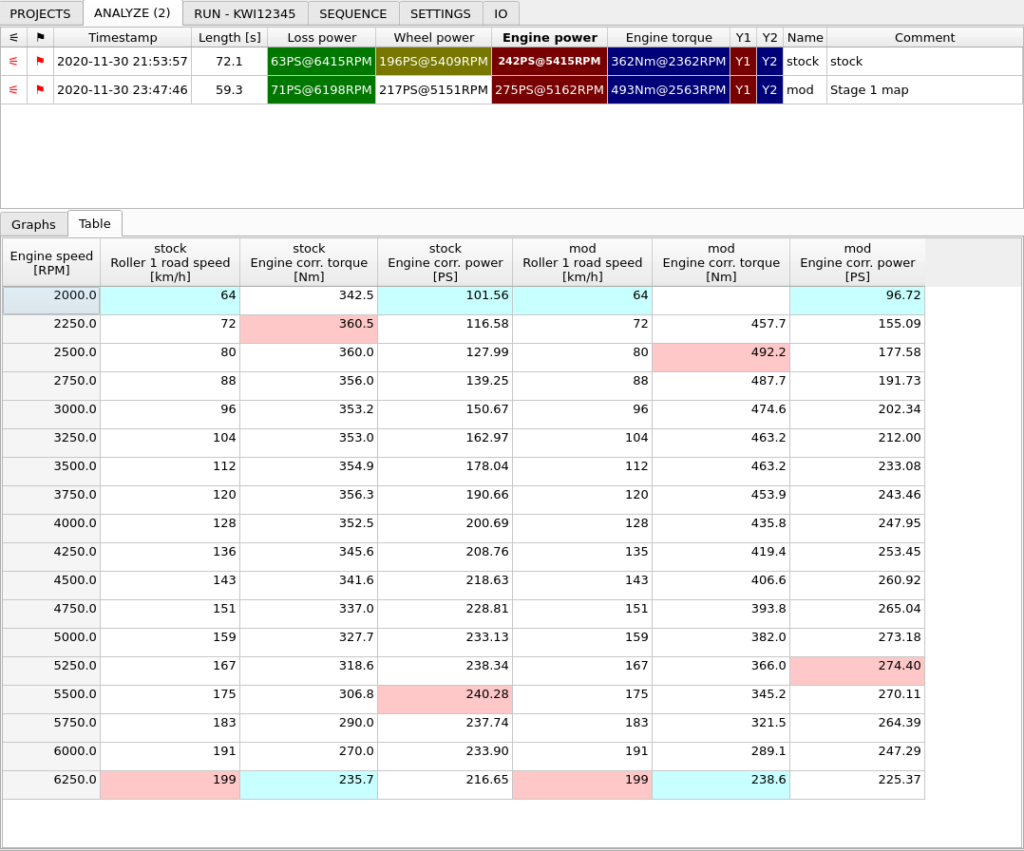
- Nieograniczone możliwości porównywania wyników pomiarów
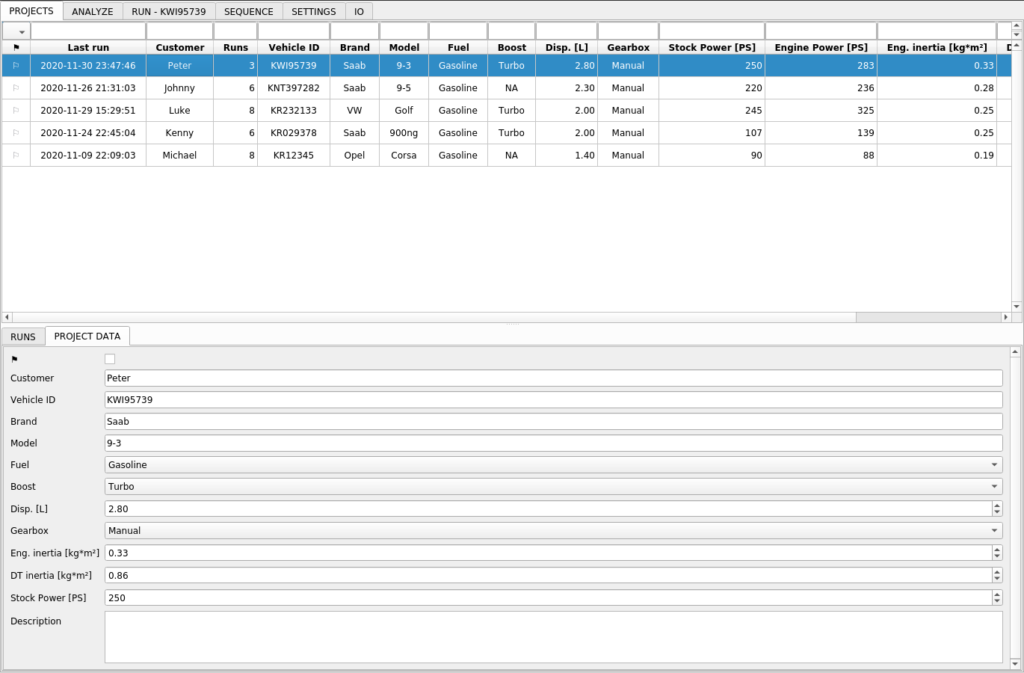
- Łatwe zarządzanie projektami i pomiarami
- Pomiary zapisywane w formacie HDF umożliwiającym analizę danych w zewnętrznym oprogramowaniu np. MATLAB
- Możliwość eksportu danych do formatu CSV (Excel).
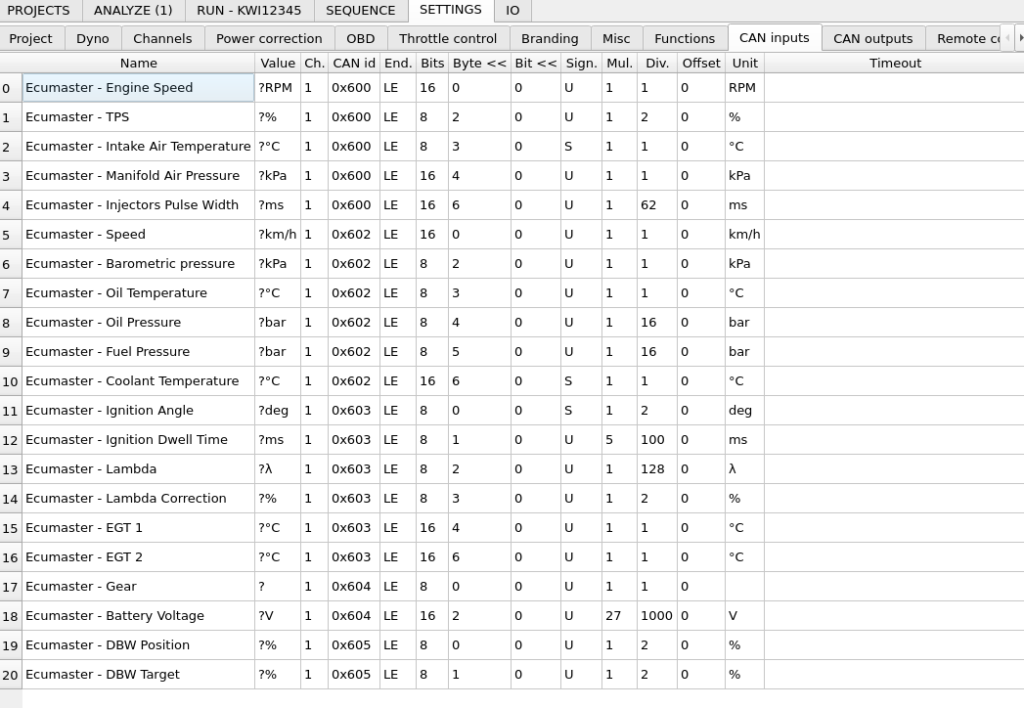
- Programowalny odczyt danych z magistrali CAN
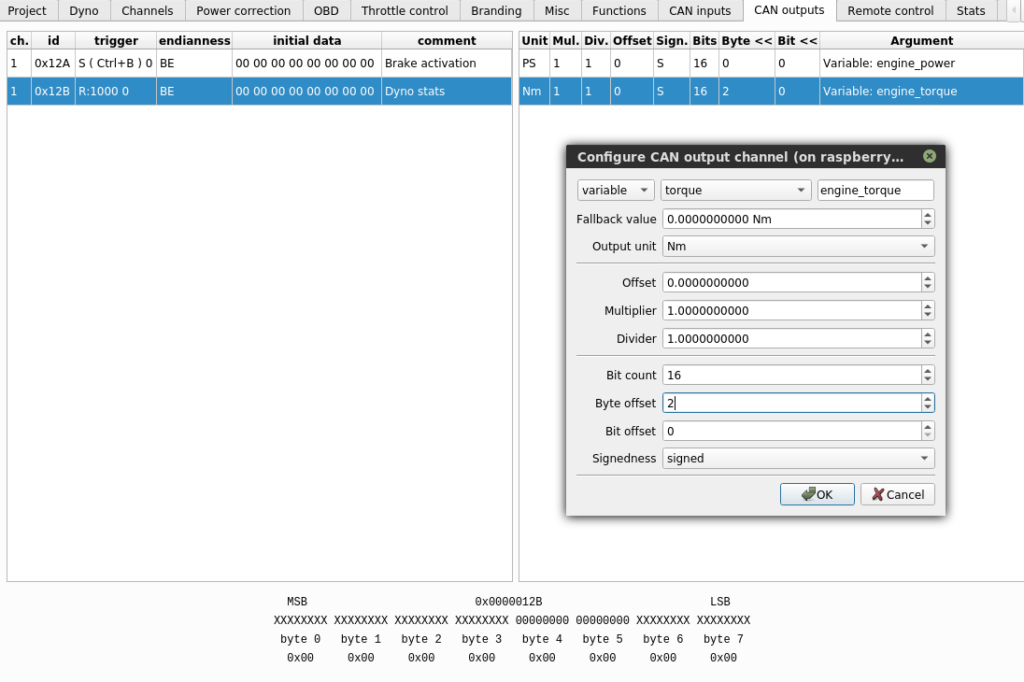
- Programowalny eksport danych na magistralę CAN
- Możliwość rozszerzania funkcjonalności urządzenia poprzez moduły połączone magistralą CAN – np. kontrolery sondy szerokopasmowej
- Programowalna logika sterowania wyjściami urządzenia na podstawie wszystkich dostępnych danych
Więcej aktualnych danych o oprogramowaniu i urządzeniach można znaleźć w sekcji Help.