DC2
Dyno Controller
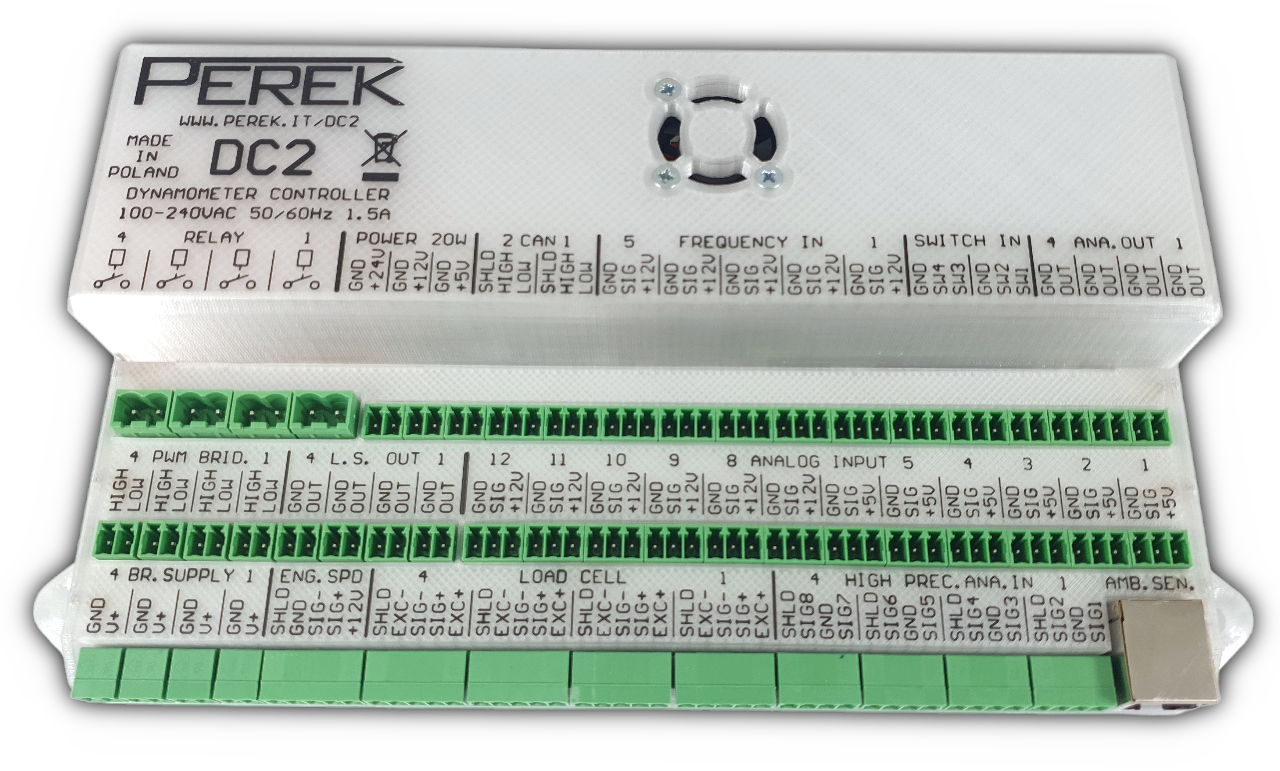
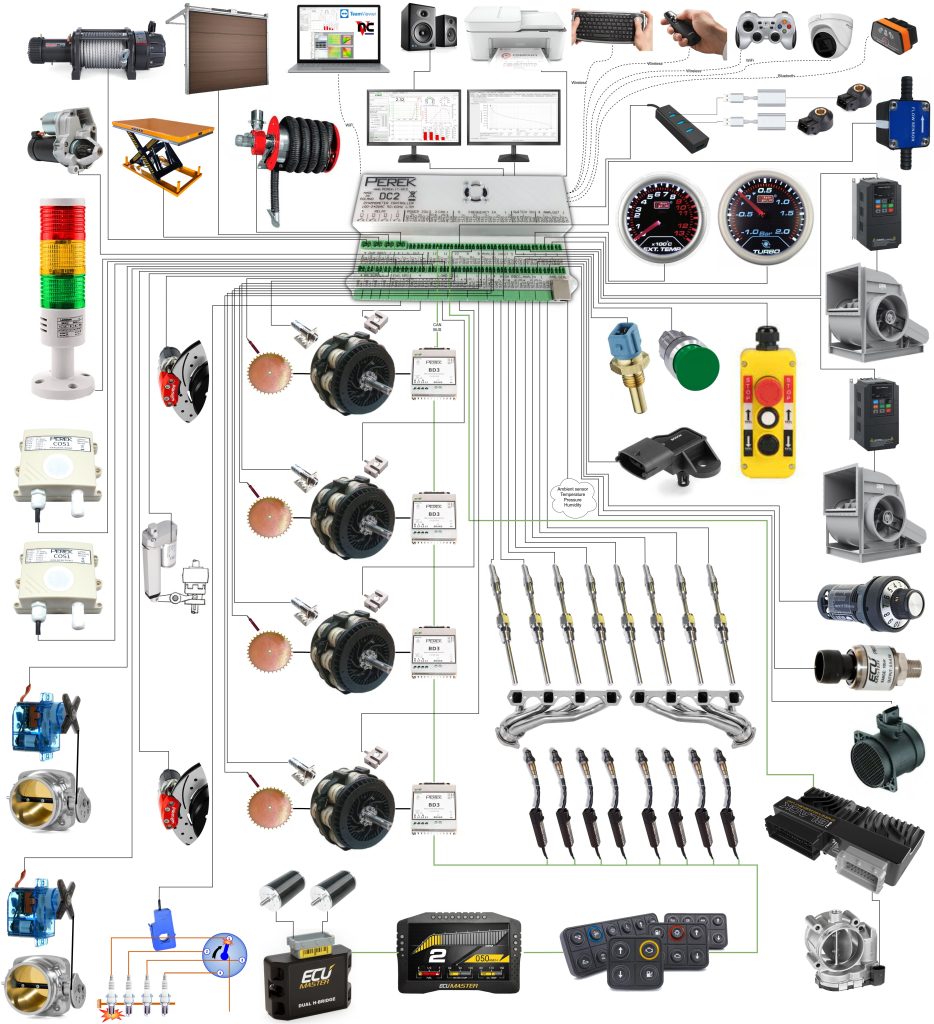
Top-end controller for most advanced dynamometers. Supports 4WD chassis dynamometers without mechanical synchronization and 4WD hub dynamometers. Many inputs and outputs allow connection of additional sensors and actuators.
DC2L
Dyno Controller
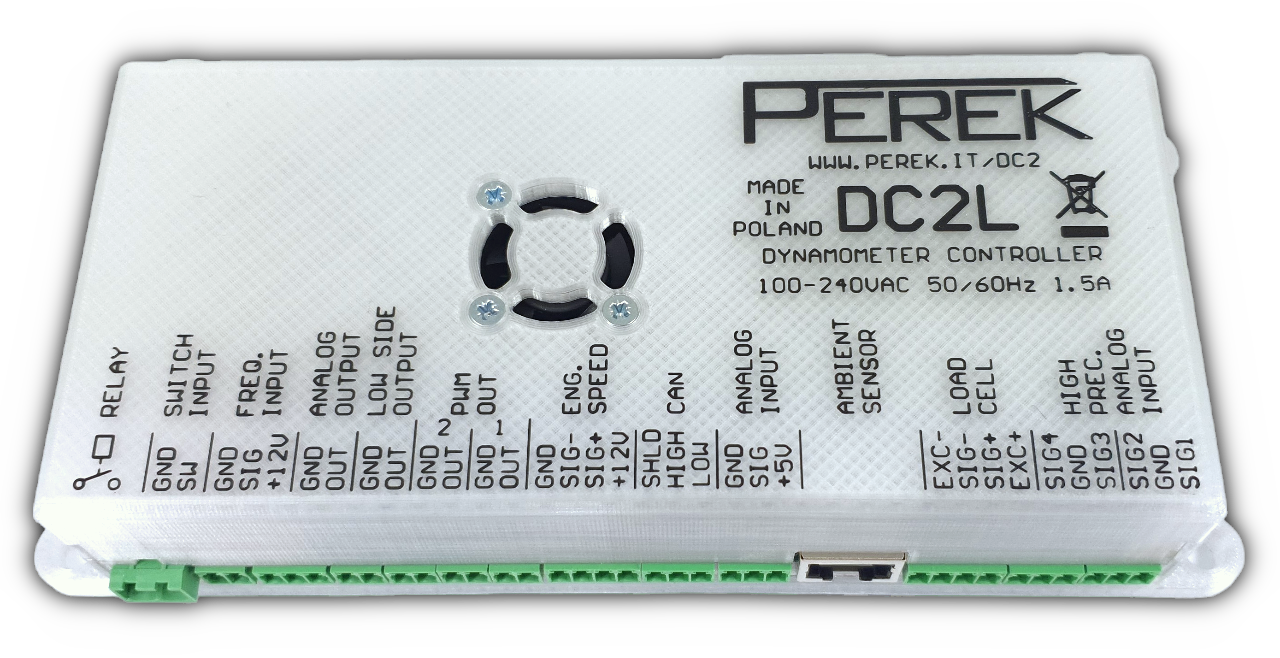
Affordable controller for budget dyno builds. Despite its decent price, it supports braked dynamometers, engine dynamometers, and 4WD chassis dynamometer with mechanical synchronization.
BD3.1
Brake Interface

High-speed eddy current brake power supply with fast demagnetization and 3 phase mains power supply. Absorber current controlled via CAN bus.
Key system features
- Support for all dynamometers: inertial and braked up to the most advanced 4WD hub dyno.
- Support for all dyno absorbers: eddy current brake / retarder, water brake, hydraulic brake and others.
- Fully programmable analog input characteristic allow connecting of any analog sensor: temperature sensors, pressure sensors, wideband lambda controllers.
- Total 14 outputs for control of peripheral devices in your dyno test cell.
- All-in-one device DAQ Dyno Controller. No additional PC computer is required, however the device can be operated from an external PC.
- All typical PC interfaces like HDMI, USB, Ethernet, Wi-Fi and Bluetooth available.
- Free software included with device. Lifetime free updates. No extra paid or licensed features.
- Real-time data acquisition and plotting.
- Configurable user interface: plots, gauges, numeric displays can be freely added, arranged and personalized on the desktop.
- Unlimited number of tests can be loaded, analyzed and printed on report at the same time.
- Powerful data analysis tools: graphs, multi run table, color map, xy map table
- Test results export to CSV, Excel, JPG, PNG, BMP, GIF and PDF report.
- Report e-mail to customer directly from software.
- Online report sharing and leaderboard via zdyno.com
- Independently selectable units for any data channel: metric and imperial. Automatic unit conversion for CAN and sensor inputs.
- Multi-language software with translations available in over 35 languages and support for custom translations.
- Test modes:
- inertial (without absorber),
- manual brake torque,
- steady state speed,
- steady acceleration or deceleration,
- ramp test,
- programmable speed sequence,
- programmable acceleration sequence,
- road simulation with drive cycles,
- race simulation from telemetry log,
- connection with racing simulator.
- Guided advanced test with instructions for operator. Hold on start speed, acceleration ramp, hold on top speed and accelerated coast down.
- Project and runs database with searching and sorting to keep your data organized and accessible.
- Stock vehicle database with parameters of cars (3200+ models) and motorcycles (1700+ models) like stock power, torque, gearbox etc.
- Highly configurable absorber control. Independent control loops. Different brake types can be used at once in one dyno. Stepper motor support.
- Power corrections with included ambient conditions sensor (weather station): DIN 70020, EC 95-1, ISO 1585, JIS D1001, SAE J1349, SAE J607, EEC 80/1269, FOS 2-stroke.
- OBD2 support via USB or Bluetooth adapters. Programmable data logging.
- IP camera run recording and monitoring.
- Engine knock detection from knock sensor signal.
- Powerful data logging with total of 27 inputs. In AWD hub dyno 19 inputs are left spare for additional sensors!
- 2x CAN-bus interface for system expansion with external modules. Input and output messages fully programmable.
- ECU data logging via CAN-bus. 26 ready-made ECU presets available and .DBC support.
- High precision 16bit analog inputs.
- Speed inputs resolution: 32ns (0.000000032s)
- High sampling frequency: 500Hz for analog inputs, 1000Hz for speed inputs.
- Fast absorber control loop running at 1000Hz frequency.
- Fast eddy current brake power supply:
- Typical full current in 0.2s and back to no current in 0.02s!
- Closed loop current control with CAN-bus diagnostics.
- 1-phase or 3-phase supply.
- Digital speed synchronization between rollers or wheels.
- Automatic loss measurement to calculate torque and power at engine.
- Customizable reports. Page orientation, plots size, visible parameters, company information and logotype can be personalized.
- Engine speed can be calculated or sampled from inductive clamp, OBD interface or CAN-bus.
- Functions system for custom channels calculation (math channels) and automation of outputs control.
- K-type thermocouples can be connected directly.
- Data channels monitoring with warnings and alarms.
- Throttle control with programmable sequences.
- High compatibility with existing absorber. It can be controlled via analog output, PWM signal or CAN-bus.
- Powerful DSP signal filtering / averaging / smoothing. Fully programmable to remove unwanted noise or vibrations.
- The system can be remotely controlled via CAN bus to allow integration with other systems in your dyno test cell.
PEREK supports all dynamometer types
Why chose PEREK products?
I founded the PEREK company in 2019 based on many years of experience in mechatronic engineering and electronic systems design at ECUMASTER. I constantly expand the offer in the field of electronic solutions for dynamometers and create products both for professional testing rig and for hobbyists who want to inexpensively equip their own dyno with a new data acquisition system (DAQ).
As a motorsport and modern technology enthusiast, I take care to meet the needs of my customers both in terms of electronic devices and the provided software.
During my years of experience with dynamometer upgrades, I gathered both first-hand experience and feedback from my customers with upgrades of dynamometers:
Bosch FLA 203, Bosch FLA 206, SUN / Maha LPS 2000, Maha LPS 3000, Hofmann Dynatest, CARTEK, Dynojet, Mustang MD, Dynocom, Dynomite / Land and Sea, Dynomax, Dimsport, Vtech, Dynoproject, Froude, SuperFlow, Dyno Developments, Dyno Dynamics.
I also have experience with eddy-current absorbers (retarders) from Frenelsa, KLAM, Telma, Pentar Kloft, KEAO, Schenck, AVL, Borghi & Saveri, Elektromex
and with water brakes from Stuska, Clayton.
Even if you want to upgrade a dyno I never heard of, a few pictures of the hardware and some info will be enough for me to help you with the upgrade.
Building a new dyno for hobby, lab or commercial sales? Don’t hesitate to contact me early in the design stage. I’ll be happy to share my experience to help you build the dyno that will work well for you.
Great quality for decent price
I provide you with high quality, feature rich products that come with a price that won’t knock you off your feet
Compatible with your hardware
My products are designed to be compatible with your existing hardware. Updating your old dyno hardware with a new controller won’t be a problem.
Interoperability with peripherals
My controllers are equipped with flexible CAN data bus that allows dyno to take commands from other devices or to send diagnostic data to other systems. Functionality can be upgraded with additional modules.
Support included
If you have any trouble setting up our controller, contact me! I will help you get your dyno configured and ready to go in no time.
Lifetime software updates
I know that the world is moving forward. My software is constantly evolving to meet new demands, and you can download all updates for free.
Clear and modern documentation
I keep the help section full of articles that will help you to get around the dyno software and set up your dyno yourself. Many topics are covered in video presentations.
My customers



















































Dynamometer suppliers
If you’re interested in buying a complete dynamometer, don’t hesitate to contact one of the manufacturers, who use my dyno controller and data acquisition system.
Dyno Revolt
Most experienced partner
- Modular chassis dynamometers: from simple 2WD inertial model, up to 4WD braked model with mechanical synchronization
- Hub dynos for professional, high power motorsport
- Motorcycle dynos
- PTO dyno for agricultural machines
- Custom dynamometer solutions and rebuilds
Dynoproject

Company with rich portfolio of different dynamometers.
- Single and multi roller synchronized chassis dynos, inertial and braked
- Motorcycle dynos
- Hub dynos
- Engine dynos
- PTO dynos
- Custom solutions
DynoRev

Modular single roller chassis dynamometers. Options from inertial 2WD to linked and braked 4WD are available. PTO tractor dynos and custom solutions are available too.
Świątek
Multiple dynamometer types. Rolling road, engine test cells, aircraft engine dynamometers and custom solutions are available.


DYNOX

High-performance chassis dynamometer offering multiple configurations including 2WD–4WD and mechanical linked. Features a unique mechanical linked disengagement function for seamless 2WD/4WD switching. Fully modular design allows for upgrades to higher specifications anytime, anywhere.
Contact
Company details
PEREK Ronald Perek
Nieznanowice 125
32-420 Gdów
Poland
VAT ID: PL6832043276
phone / WhatsApp / Telegram: +48 690 328 455
I am available to help you 7 days a week. You can contact me any time.
If you are still hesitating, feel free to contact me. I can arrange system presentation via remote desktop software.
DC2 Dynamometer Controller

Multiple dyno support
4x4
ROLLING ROAD
DYNO
Engine
Test
Bench
4x4
Hub Dyno