All DC1 series controllers are discontinued and replaced with DC2 series.
Device description and supported dynamometers
DC1 series Dyno Controllers are a versatile solution designed to control multiple types of dynamometers. It’s compatible with hub, engine and chassis dynos, and it works with multiple types of dyno absorbers. DC1 series contains the following models:
- DC1 – first controller in series
- DC1E4 – top of the range, upgraded version of DC1 with two additional frequency inputs to support 4WD hub dyno and high signal count encoder support
- DC1L – budget controller for simple dynamometers that don’t require all DC1 features
| Feature | DC1L | DC1 | DC1E4 |
|---|---|---|---|
| RAM memory | 4GB | 4GB | 8GB |
| Internal data memory | 32GB | 32GB | 64GB |
| CAN-BUS lines | 1 | 2 | 2 |
| Power outputs | 5V, 12V only for sensor inputs 10W total | 5V, 12V, 24V for sensors and on separate connectors 20W total | 5V, 12V, 24V for sensors and on separate connectors 20W total |
| Analog outputs | 1 | 2 | 2 |
| Low side PWM outputs | 2 | 4 | 4 |
| ON / OFF low side outputs | 1 | 4 | 4 |
| Relay outputs | 1 | 4 | 4 |
| Hall sensor frequency inputs | 1 | 2 | 4 |
| Multi sensor, engine speed frequency input | 1 | 1 | 1 |
| Input signal frequency and supported sensors | up to 10Mhz toothed wheels and high signal count encoders | up to 15kHz toothed wheels or low signal count encoders | up to 10Mhz toothed wheels and high signal count encoders |
| 0-5V load cell inputs | 2 | 4 | 4 |
| 0-5V fast analog inputs | 1 | 6 | 6 |
| High precision 0-5V analog inputs with thermocouple support | 4 | 8 | 8 |
| Switch inputs | 2 | 4 | 4 |
| Supported dynamometer configurations | Inertial or absorption dyno (up to 2 absorption units) Engine dyno Motorcycle dyno 2WD chassis dyno 4WD chassis dyno with mechanical synchronization | Inertial or absorption dyno (up to 4 absorption units) Engine dyno Motorcycle dyno 2WD chassis dyno 4WD chassis dyno with mechanical synchronization 4WD chassis dyno without mechanical synchronization 2WD hub dyno | Inertial or absorption dyno (up to 4 absorption units) Engine dyno Motorcycle dyno 2WD chassis dyno 4WD chassis dyno with mechanical synchronization 4WD chassis dyno without mechanical synchronization 2WD hub dyno 4WD hub dyno |
The controller is an all-in-one device, that combines PC type computer with operating system and dedicated software, and microcontroller system to control dyno and acquire data in real time.
Tasks performed by the controller:
- Readout of dyno parameters and data logging signals from additional sensors and OBD
- Generation of absorbers control signal
- Control of auxiliary dyno devices such as fans etc.
- Saving of all the data and later analysis
- Option to extend controller capabilities with CAN-Bus connected devices.
DC1 can make use of any absorber system that can be controlled with:
- Digital PWM signal
- Direct PWM control with current up to 3A
- 0-10V analog signal
- CAN bus message
Most popular absorption units are:
- Eddy current absorber – fast and affordable
- Water cooled eddy current absorber – fast and suitable for long-term tests on high load
- Water brake absorber – slow but capable of high torque for long time tests
Note on modern traction control and axis synchronization:
The DC1 uses connected absorbers to synchronize speed on all vehicle wheels, however modern Traction Control systems are so sensitive to any speed difference that the best way to be sure that TC is not activated is to use mechanical axle synchronization. The AC motors synchronizing speed on axles is another solution, but it is expensive and not tested with DC1 yet.
General specification
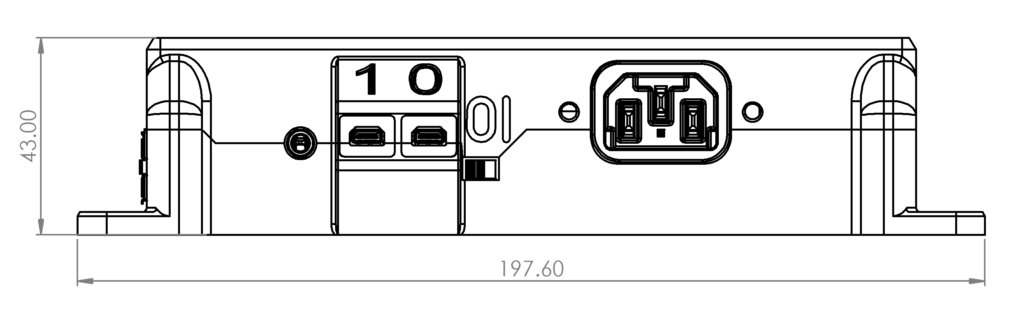
| Power supply | 100-240 VAC, 50-60Hz, 1.5A, IEC C14 socket |
| Ambient temperature | −20°C – 50°C |
| Ambient humidity | 0%-95% non condensing |
| Base computer | 4-core Cortex A72 1,5GHz 4/8GB RAM LPDDR4 Data memory 32/64GB 100MB/s |
| Microcontroller | 32-bit RISC 64MHz |
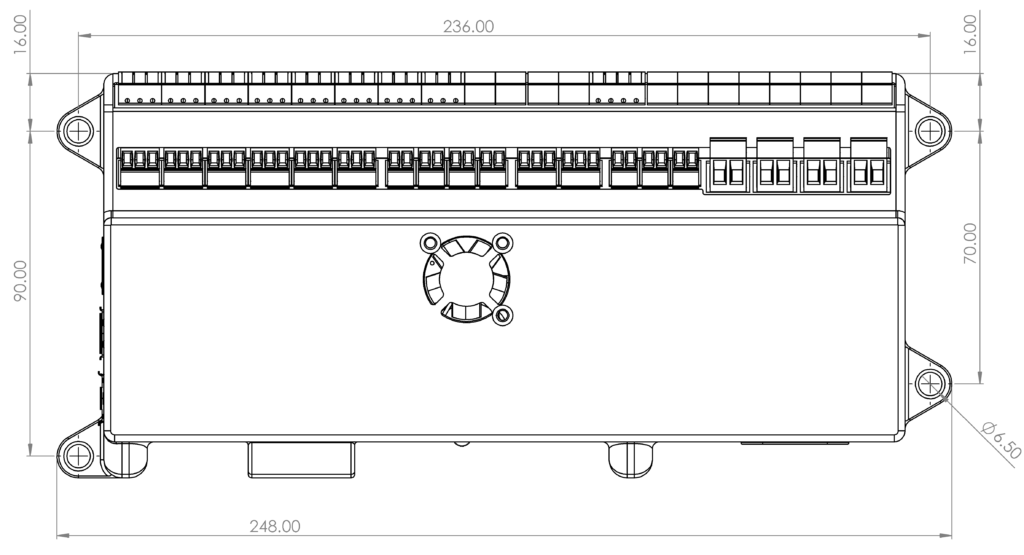
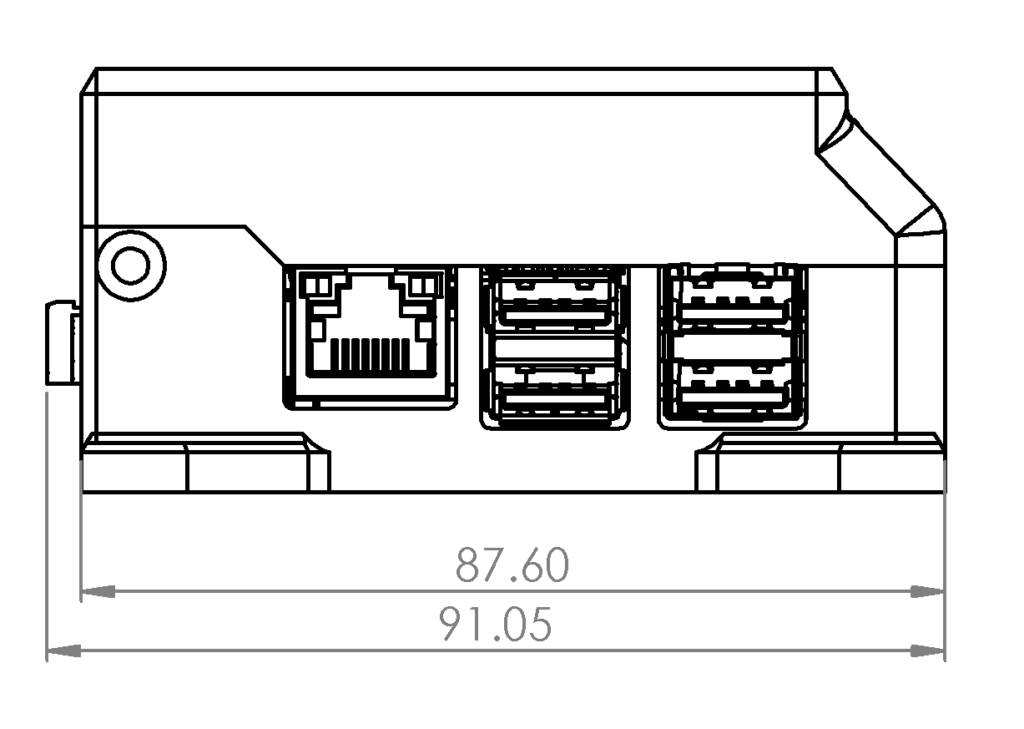
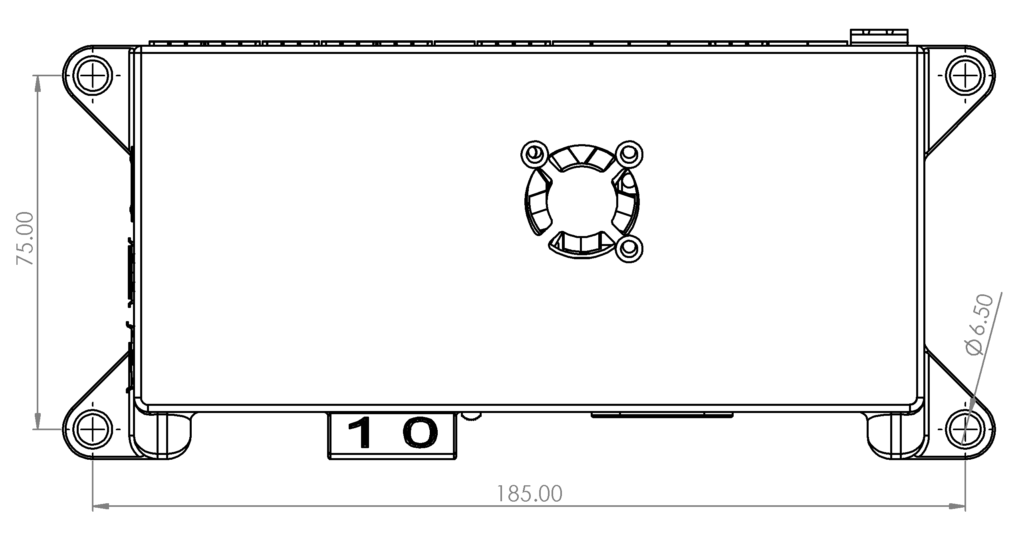
| Dimensions | 25cm x 12cm x 4.5cm |
| Mass | 607g |
Inputs / outputs
- Wi-Fi IEEE 802.11b/g/n/ac (2,4/5 GHz)
- Bluetooth 5.0 (Low Energy (BLE))
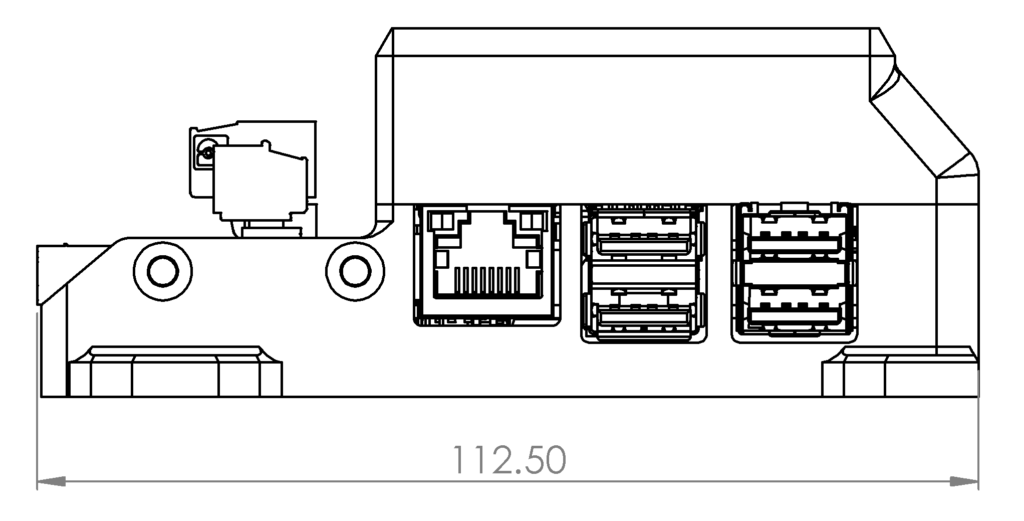
- Gigabit Ethernet
- 2 x USB 2.0
- 2 x USB 3.0
- 2 x micro HDMI
- Audio mini jack
- Ambient conditions sensor (temperature, pressure, humidity)
- CAN-BUS 2.0B
- Power outputs 24V, 12V, 5V
- Analog outputs 0-10V
- Low side PWM outputs 3A 40V
- Additional ON/OFF low side outputs 3A 40V
- Two-terminal relay outputs 250V 16A
- Hall sensor frequency inputs for axle speed
- Engine speed input for hall, VR, inductive or capacitive clamp sensors up to 15kHz
- Load cell analog inputs 0-5V (for amplified signal)
- Fast, general purpose analog inputs 0-5V
- High-precision analog inputs 0-5V for thermocouples or other analog signals
- 2-pin switch inputs
PC typical interfaces
The controller is equipped with typical interfaces, found in PC type computers, such as USB, Ethernet, micro HDMI. These allow to connect standard input / output devices such as mouse, keyboard, printer, display and internet connection. Wireless interfaces such as Wi-Fi and Bluetooth are also available.
Bluetooth enables wireless connection with vehicle OBD system, for readout of engine parameters, with use of optional interface.
Ambient sensor and power correction
Built in precise Bosch ambient sensor is used to measure temperature, pressure and humidity which can be used to calculate engine power correction. Available correction standards are:
- DIN 70020
- EC 95-1
- ISO 1585
- JIS D1001
- SAE J1349
Sensor specification:
- Humidity: 0% ÷ 100% ±3%
- Pressure: 300 ÷ 1100hPa ±1.7hPa
- Temperature: -40 ÷ 85°C ±1.25°C
All power correction parameters can be sourced from external sensors. If the DC1 is installed in a control cabinet with elevated temperature, the temperature for power correction can be sourced from:
- external sensor connected to analog input
- OBD
- CAN bus
CAN-Bus interface
The controller is equipped with CAN-Bus 2.0B interfaces, with transmission speed up to 1Mbps, compatible with ISO-11898-2 and ISO-11898-5.
Interfaces are equipped with software controlled 120Ohm terminating resistor.
CAN-Bus is routed with one twisted pair of wires and allows connecting many devices in parallel on one bus.
The interface is NOT isolated. The device you are connecting must be on to the same ground reference as the dyno controller, or the driver will be damaged. The maximum allowed DC voltage on CAN HIGH and CAN LOW terminals is -58V to +58V
Example devices that can connected to the controller via CAN-Bus:
- Additional actuator drivers, H-bridges for servo motor control
- Additional input extenders – wideband oxygen sensor controller
- Automotive displays such as Ecumaster ADU
- Engine control units such as Ecumaster EMU Black, which can be used to read engine operation parameters or to control throttle opening
Power supply outputs
DC1 / DC1E4:
- 3 separate power supply outputs: 24V, 12V, 5V (2A), capable of total 20W power
DC1L:
- 12V and 5V is supplied only to sensor connectors with total 10W power
Low power external modules can be connected to the supply.
The supply can be used to power external relays and control them with low side outputs.
USB
Up to 1A total can be used from USB ports. If you have devices that need more, use external USB hub that has a separate power supply.
Analog outputs
- Analog outputs with 0-10V range are intended to control auxiliary dyno devices requiring analog signal.
- Can be used to control dyno absorber in retrofit applications.
- Output impedance: 1kOhm
- Resolution: 12bit
Low side and relay outputs
The controller is equipped with low side outputs, capable of connecting terminal to ground.
- Maximum switched voltage: 40V
- Maximum current: 3A continuous, 12A peak
- Maximum inductive load switching energy: 50mJ
- Built in 10kOhm pull-up resistor to +12V for digital signal generation
- Short circuit and overload protected
Part of the outputs have hardware PWM generation functionality and can generate PWM signal with frequency from 0.06Hz to 50kHz and resolution of 20bit. PWM outputs are capable of controlling:
- eddy current brakes (with use of external BD1 brake power supply)
- solenoid valves
- servo motors compatible with RC pulse signal
- power modulation of devices such as cooling fans etc.
Remaining low side outputs and relay outputs are controlled with programmable logic and allow to power auxiliary devices according to operating conditions or user input. Example use cases are:
- automatic fan turn on above preset engine speed
- starter motor control from dyno keyboard
Relay output capacity is 250V 16A for resistive load. Switching high inductive load may require an external arc suppression circuit.
Frequency inputs
Shaft speed signal inputs specification
- Maximum input signal voltage: 15V
- Signal threshold voltage: 2.5V
- Hysteresis: 0.6 – 1.2V
- Pulse capture mode frequency range: 15mHz – 15kHz
- Pulse capture mode resolution: 31.25ns
- Pulse capture mode accuracy: 0.003%
- Pulse capture mode precision @ 1kHz: 0.0032%
- Pulse capture mode precision @ 15kHz: 0.045%
- Pulse count mode frequency range: 10kHz – 10Mhz
- Pulse count mode sampling frequency: 1000Hz
- Pulse count mode accuracy: 0.003%
- Pulse count mode precision = Sampling frequency / Input frequency
- Pulse count mode precision @1MHz: 0.1%
The engine input allows reading signal from Hall, VR, inductive or capacitive clamp sensors. It can be used to read engine speed in cases where the speed is not in constant relation with dyno roller or shaft speed.
- Input voltage up to 50VAC sine, 250V peak
- Differential input
- Adaptive signal arming threshold from 23Hz up
- Pulse capture mode frequency range: 15mHz – 15kHz
- Pulse capture mode resolution: 31.25ns
Analog inputs
The device has analog inputs with 0-5V range. Some of those inputs are reserved for amplified load cell signal. Other inputs can be used to connect any additional sensor.
- Maximum input voltage: 30V
- Measurement range: 0-5V
- Hardware ADC resolution: 11bit (2.5mV)
- Resolution with oversampling: 14bit (1mV)
- Sampling frequency: 500Hz
- Measurement accuracy: 1% @ 0°C ÷ 40°C
- Measurement precision: 0.3% @ 0°C ÷ 40°C
A load cell cannot be directly connected to analog input. Load cell signal must be amplified. It can be done with amplifier build in BD1 brake power supply or stand alone LCA1 amplifier.
High-precision analog inputs
The device has differential pairs of high precision analog inputs. These inputs can be used for direct thermocouple connection or for connection of any sensor giving signal in 0-5V range. Every pair allows measuring one signal in differential or two signals single-ended mode.
| DC1L | DC1 / DC1E4 | |
|---|---|---|
| Maximum differential signals | 2 | 4 |
| Maximum single ended signals | 4 | 8 |
- Resolution: 16bit (3.9μV – 94μV)
- Sampling frequency: 10Hz
- Voltage ranges: 0-256mV to 0-5V
- Measurement accuracy: 0.16% @ 0°C ÷ 40°C
- Measurement precision: 0.1% @ 0°C ÷ 40°C
K-Type thermocouple connection:
Differential (above and below ambient temperature measurement):
alumel (-) to S2
chromel (+) to S1
Single ended (only above ambient temperature measurement):
alumel (-) to –
chromel (+) to S1 or to S2 for second sensor
Switch inputs
The device has inputs for switch connection. A switch can be used to activate software functions or controller outputs.
Safety precautions
- The device should be fixed on a hard, flat surface in a well-ventilated area.
- The device must not be exposed to vibration.
- The device air flow must not be obstructed.
- No foreign objects should be inserted into the device.
- Life-threatening, high voltages are present in the device. Make sure that it is disconnected from mains power supply before doing maintenance work.
- The device is intended for installation by qualified personnel.
- The device should be protected from access by unauthorized personnel.
- The device should be protected from moisture. It mustn’t be used when wet.
- The device mustn’t be powered without the enclosure assembled.
- The device installation doesn’t require enclosure disassembly.
- If the device is not working correctly, makes disturbing noises, emits burning smell, it should be immediately powered down. Please contact the manufacturer for repair.
- The device power supply must be protected with 2Amp circuit breaker.
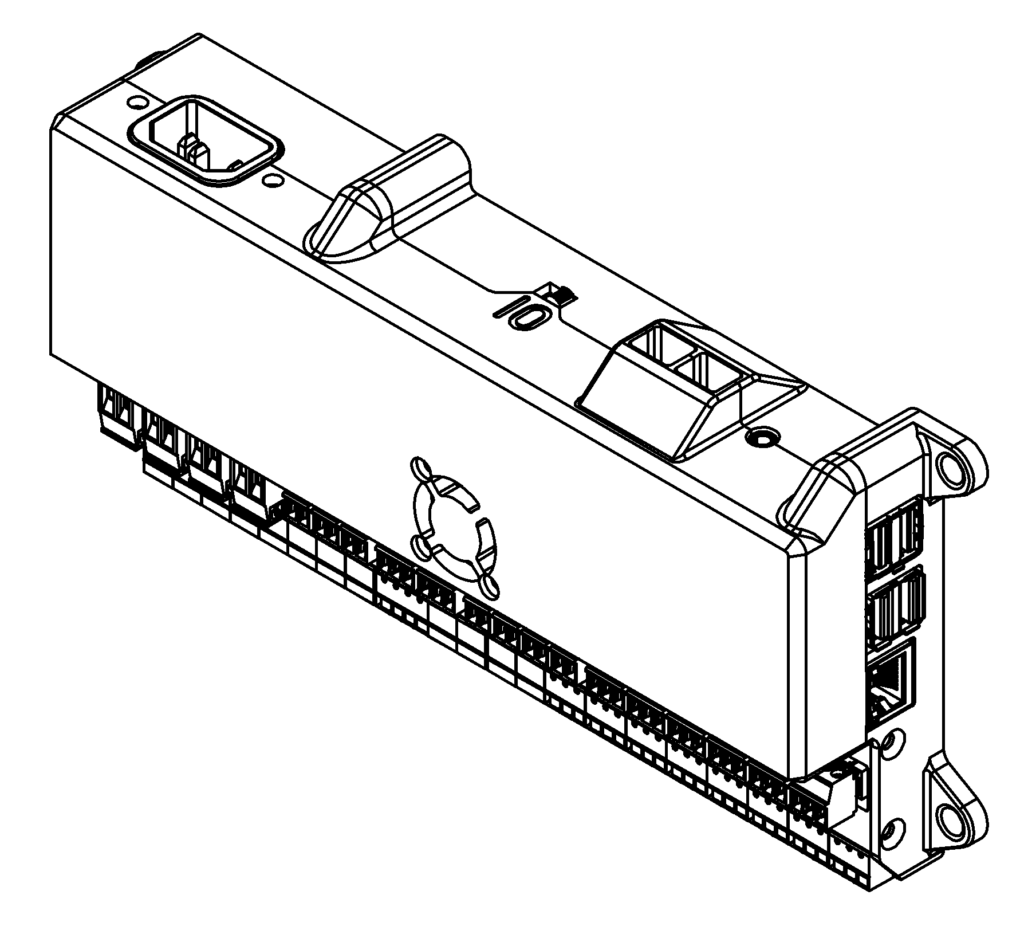
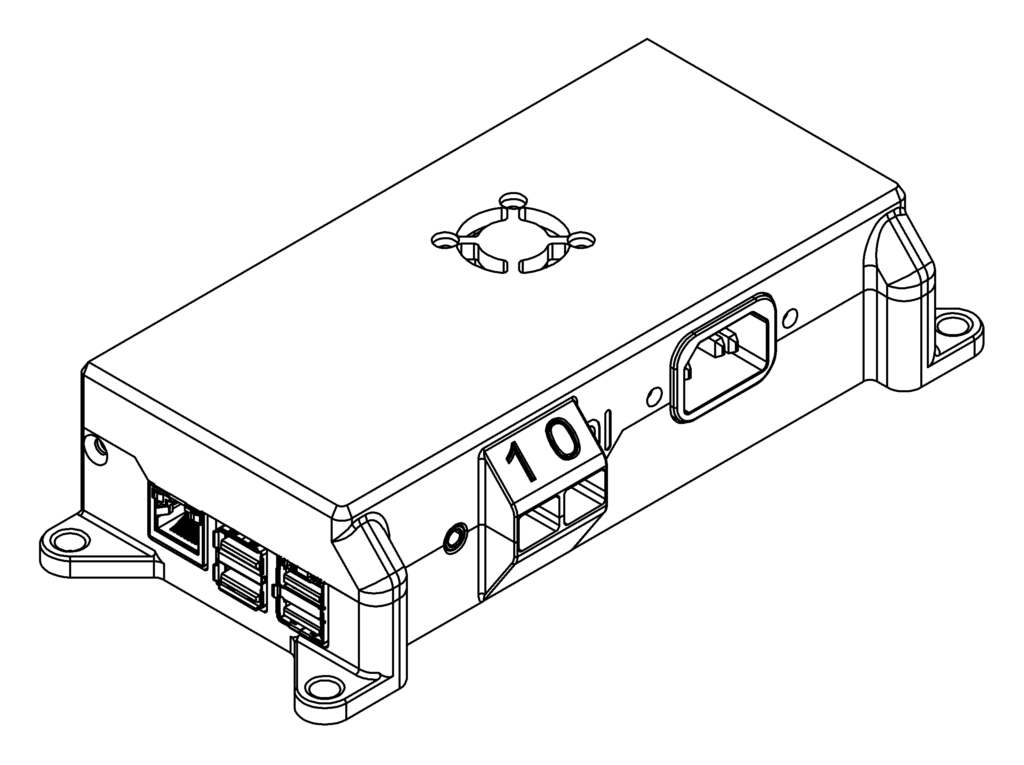
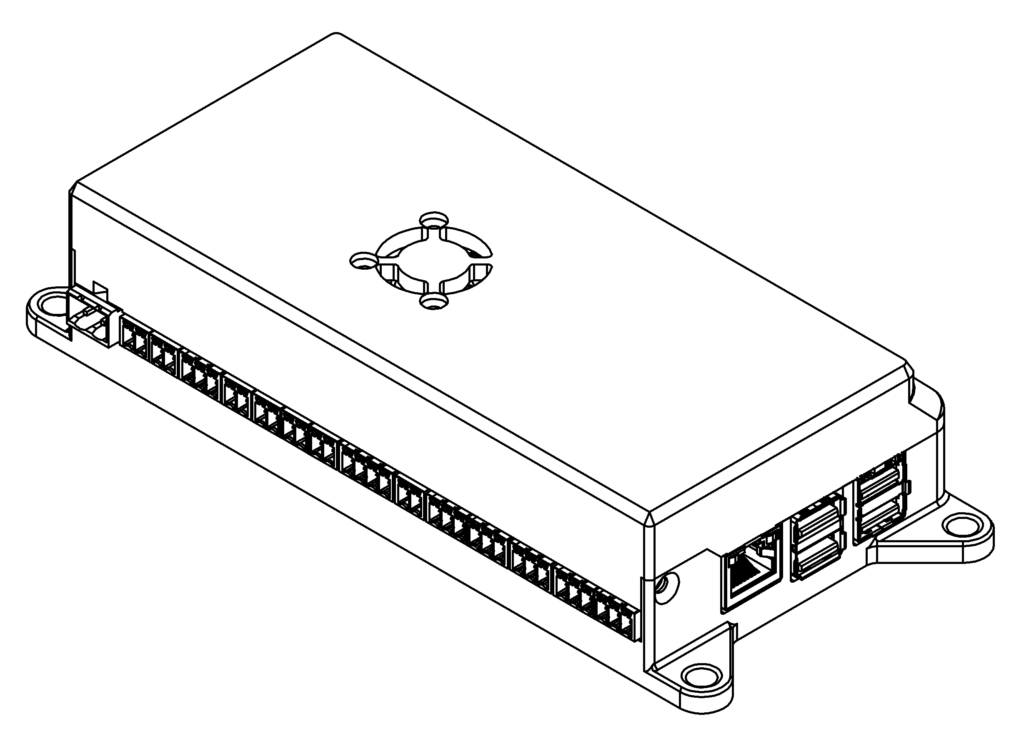
Technical drawings DC1 / DC1E4

Technical drawings DC1L
Pinout DC1
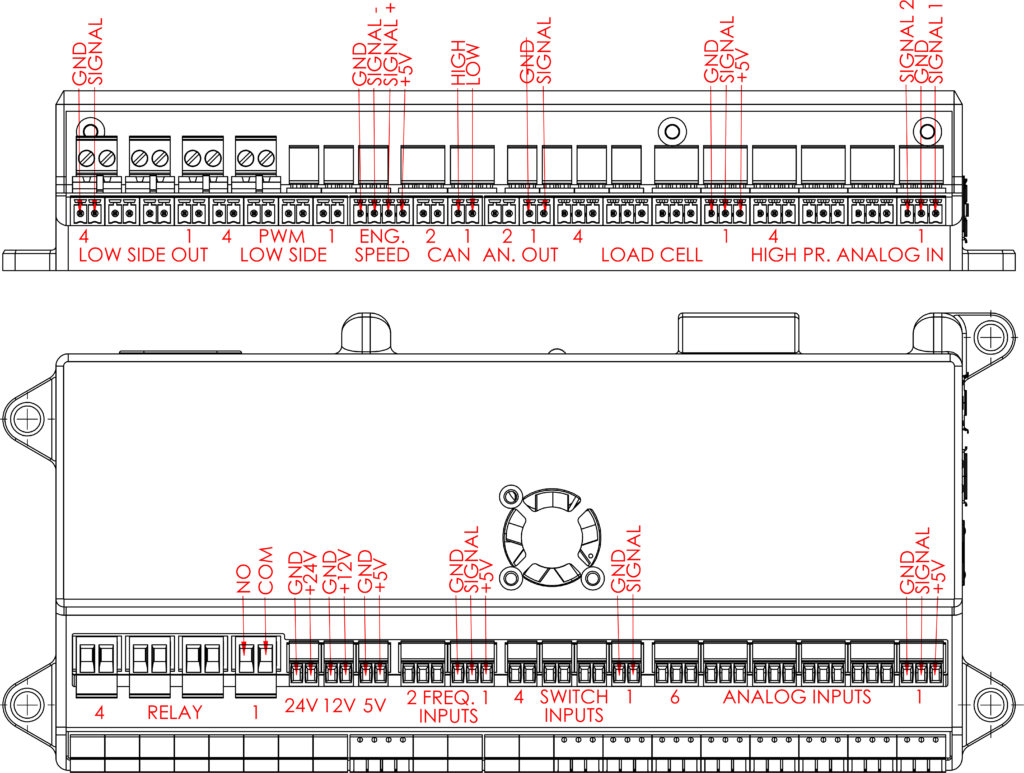
Pinout DC1E4
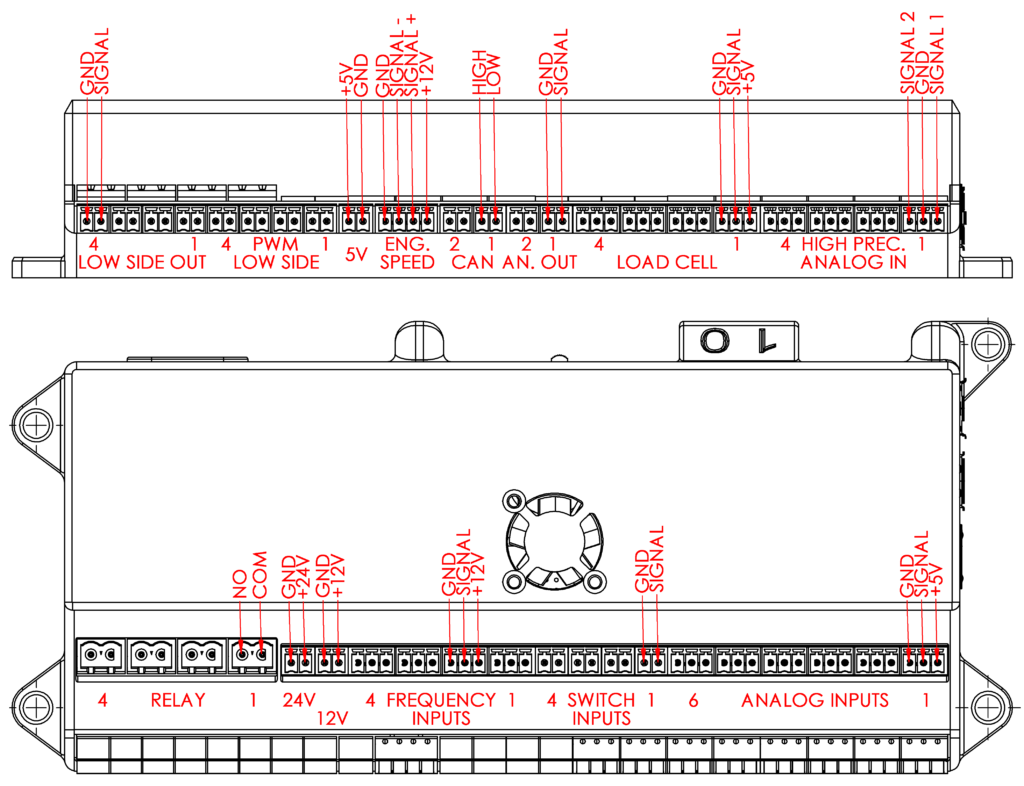
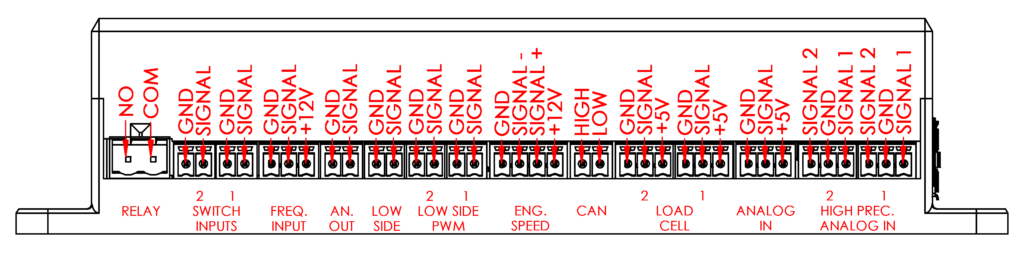
Pinout DC1L
Warranty
The producer guarantees that the device is manufactured according to accepted craftsmanship practices, and it meets the applicable standards. Correct device operation is guaranteed for 24-month period starting from date of purchase.
The guarantee does not cover damages caused by improper installation, usage or non-compliance with the instruction manual.
The device is intended for installation by qualified personnel. Device final performance and suitability for a particular application is dependent on the user, and thus it is not guaranteed by the manufacturer.
These specifications are subject to change without notice.
FCC
This device complies with part 15 of the FCC Rules. Operation is subject to the following two conditions:
- This device may not cause harmful interference.
- This device must accept any interference received, including interference that may cause undesired operation.
Contains TX FCC ID: 2ABCB-RPI4B
Contains IC: 20953-RPI4B