
Included in package:
- DC2L controller
- full signal connector set
- weather station with cable
Specification
| Power supply | 100-240 VAC, 50-60Hz, 1.5A, IEC C14 socket |
| Ambient temperature | −20°C – 50°C |
| Ambient humidity | 0%-95% non condensing |
| Base computer | 4-core Cortex A76 2.4GHz 4GB RAM LPDDR4 Data memory 64GB 100MB/s |
| Microcontroller | 32-bit RISC 64MHz |
| Dimensions | 20cm x 9cm x 4.5cm |
| Mass | 0.36kg |
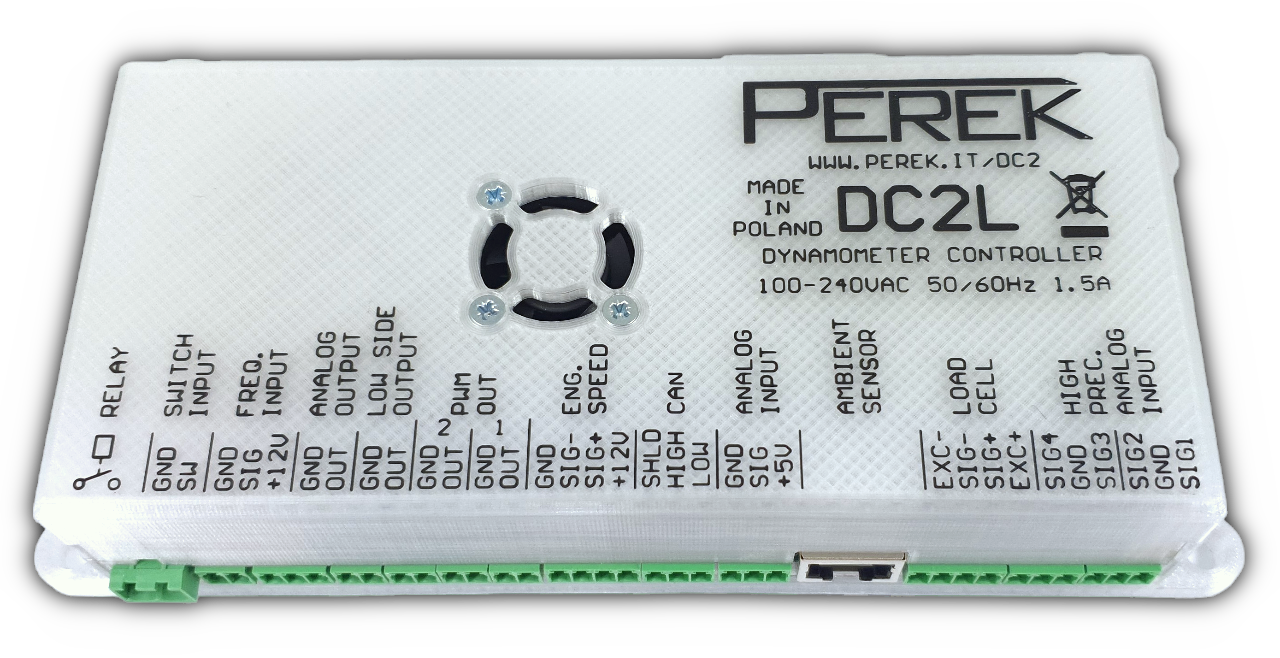
Inputs / outputs
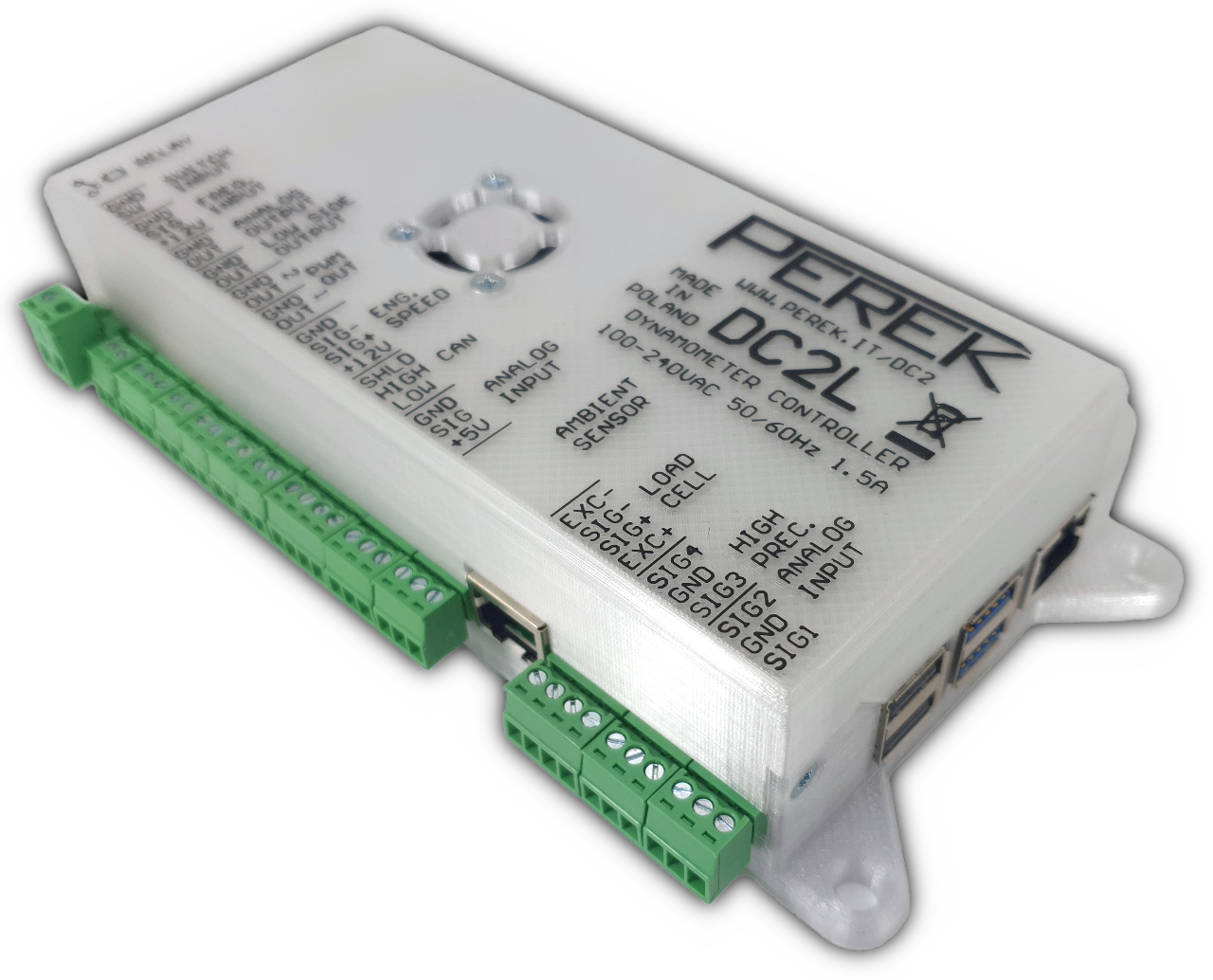
- Wi-Fi IEEE 802.11b/g/n/ac (2,4/5 GHz)
- Bluetooth 5.0 (Low Energy (BLE))
- Gigabit Ethernet
- 2 x USB 2.0
- 2 x USB 3.0 (one occupied by data memory)
- 2 x micro HDMI
- Ambient condition sensor / weather station (temperature, pressure, humidity) included as a separate device
- CAN-BUS 2.0B
- Power outputs for sensors 12V, 5V
- Analog output 0-10V
- 2 low side PWM outputs 3A 40V
- Additional low side output 3A 40V
- Two-terminal relay output 250V 16A
- Hall sensor / encoder roller speed input up to 10Mhz
- Engine speed input for hall, VR, inductive or capacitive clamp sensors up to 15kHz
- Dedicated load cell input with integrated amplifier
- General purpose analog input 0-5V
- 4 thermocouple inputs with analog input capability
- Physical switch input
PC typical interfaces
The controller is equipped with typical interfaces, found in PC type computers, such as USB, Ethernet, micro HDMI. These allow to connect standard input / output devices such as mouse, keyboard, printer, display and internet connection. Wireless interfaces such as Wi-Fi and Bluetooth are also available.
Bluetooth enables wireless connection with vehicle OBD system, for readout of engine parameters, with use of optional interface.
Ambient sensor
The ambient sensor in the form of a separate device that connects to the main controller is included in the package. It is used to measure temperature, pressure and humidity which can be used to calculate corrected engine power according to common standards.
CAN-Bus interface
The controller is equipped with CAN-Bus 2.0B interface, with transmission speed up to 1Mbps, compatible with ISO-11898-2 and ISO-11898-5.
The interface is equipped with software controlled 120Ohm terminating resistor.
CAN-Bus is routed with one twisted pair of wires and allows connecting many devices in parallel on one bus.
Example devices that can connected to the controller via CAN-Bus:
- Additional actuator drivers, H-bridges for servo motor control
- Additional input extenders – extra analog input converters, wideband oxygen sensor controller
- Automotive displays such as Ecumaster ADU
- Engine control units such as Ecumaster EMU Black, which can be used to read engine operation parameters or to control throttle opening
Sensor power supply outputs
- Output 12V 9W
- Output 5V 1W
Analog output
- Analog output with 0-10V range are intended to control auxiliary dyno devices requiring analog signal.
- Can be used to control dyno absorber in retrofit applications.
- Output impedance: 1kOhm
- Resolution: 12bit
Low side and relay outputs
The controller is equipped with 3 low side outputs, capable of connecting terminal to ground.
- Maximum switched voltage: 40V
- Maximum current: 3A continuous, 12A peak
- Maximum inductive load switching energy: 50mJ
- Built in 10kOhm pull-up resistor to +12V, intended for digital signal generation
- Short circuit and overload protected
2 of these outputs have hardware PWM generation functionality and can generate PWM signal with frequency from 0.06Hz to 50kHz and resolution of 20bit. PWM outputs are capable of controlling:
- eddy current brakes (with use of external BD1 brake power supply)
- solenoid valves
- servo motors compatible with RC pulse signal
- power modulation of devices such as cooling fans etc.
Remaining low side output and relay output are controlled with programmable logic and allow to power auxiliary devices according to operating conditions or user input. Example use cases are:
- automatic fan turn on above preset engine speed
- starter motor control from dyno keyboard
Relay output capacity is 250V 16A.
Frequency inputs
The controller is equipped with 2 frequency inputs.
One input is intended for hall type sensors or encoders to measure chassis dyno roller rotational speed or for engine dyno to measure dyno main shaft rotational speed. In „pulse capture” mode, acceptable input frequency is 15mHz to 15kHz. In „pulse count” mode, frequency up to 10Mhz is accepted.
- Maximum input signal voltage: 15V
- Signal threshold voltage: 2.5V
- Hysteresis: 0.6 – 1.2V
The second input allows reading signal from Hall, VR, inductive or capacitive clamp sensors. It can be used to read engine speed in cases where the speed is not in constant relation with dyno roller or shaft speed.
- Input voltage up to 50VAC sine, 250V peak
- Differential input
- Adaptive signal arming threshold
Load cell input
The controller has a dedicated, differential high precision input with built-in programmable amplifier for direct connection of a load cell.
- Amplification range: 1-128
- Differential voltage range: 4V
- Voltage on inputs for measurement: 0.5V – 4.5V
- Allowable voltage on inputs: 0V – 5V
- Resolution: 24bit
- Logging frequency: 500Hz
- Sampling frequency: 256kHz
Analog inputs
The device has one analog inputs with 0-5V range. The input can be used to connect any additional sensor.
- Maximum input voltage: 30V
- Resolution: 14bit
- Logging frequency: 500Hz
- Sampling frequency: 25kHz
High-precision analog inputs
The device has 2 differential pairs or high precision analog inputs. These inputs can be used for direct thermocouple connection or for connection of any sensor giving signal in 0-5V range. Every pair allows measuring signal in differential or single-ended mode. The single-ended mode allow connection of 4 sensors total.
- Resolution: 16bit
- Logging frequency: 10Hz
- Sampling frequency: 250kHz
- Voltage ranges: 0-256mV to 0-5V
Switch input
The device has input for switch connection. A switch can be used to activate software functions or controller outputs.
